「The Total Point Clouds Captured By Drone Camera」
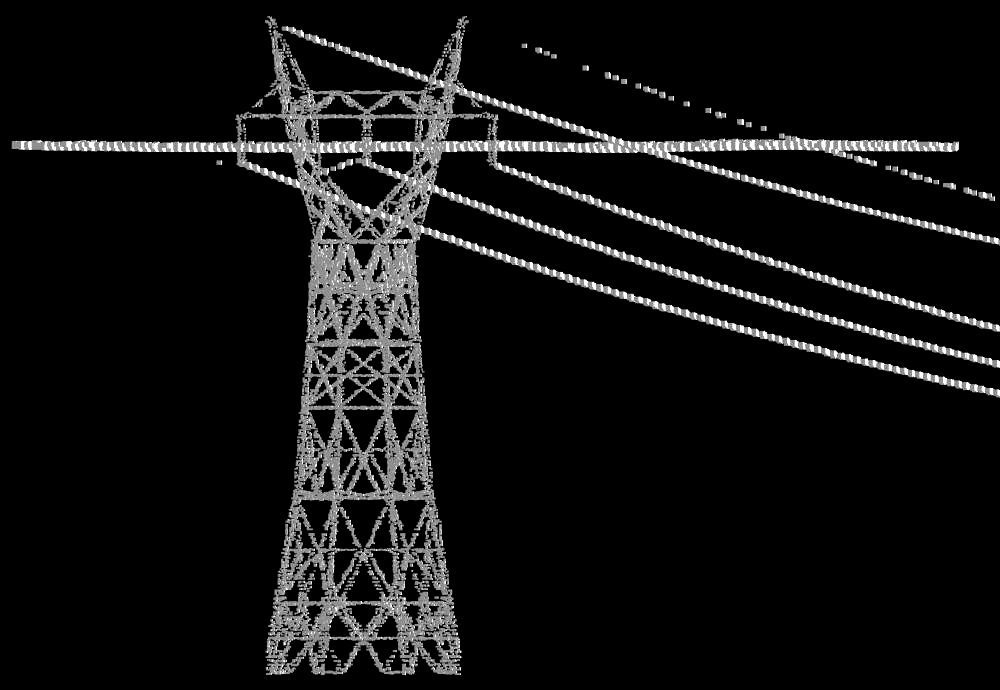
The next image indicates original point-clouds of the pylon taken through drone camera.
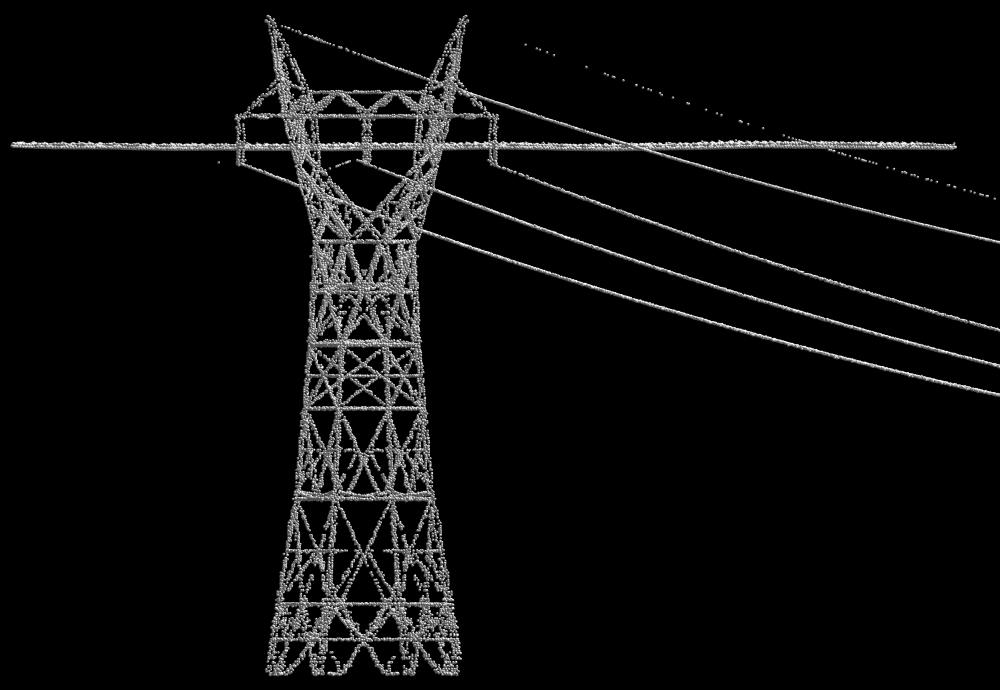
The next two images from a different viewpoints, both indicate point clouds where the point dencity is increased for processing. The next two images indicate polygons generated with the above point clouds.

![]()
![]()

![]()

![]()